|
I am currently a Masters student in Computer Science at University of California, San Diego, USA . Previously, I was a Computer Vision & Deep Learning Engineer at Preimage Pvt. Ltd . My work is primarily focused on developing structure-from-motion pipeline using drone images and GPS data. Previously, I was as a data scientist at the PayU. I did my bachelor's thesis under the guidance of Prof. Dr. Cyrill Stachniss at StachnissLab, University of Bonn, Germany. My work targeted on creating a map for self-driving cars which was free of any dynamic objects. I have also worked under the guidance of Prof. Dinesh Manocha from the University of Maryland, College Park, USA on predicting the trajectories of self-driving cars. I was also selected as a Google Summer of Code recipient for The Mifos Organization in 2020.
I did my Bachelor's in Information Technology from IIIT Allahabad. I was advised by Dr. Rahul Kala and we worked on improving localization accuracy of traditional SLAM algorithm using Deep Learning.
Here is my Resume. Email / Github / Google Scholar / Linkedin |
|
|
My research interests include computer vision, robotics, autonomous driving, and 3D reconstruction. I am interested in understanding the world as it is perceived by a robot. |
|
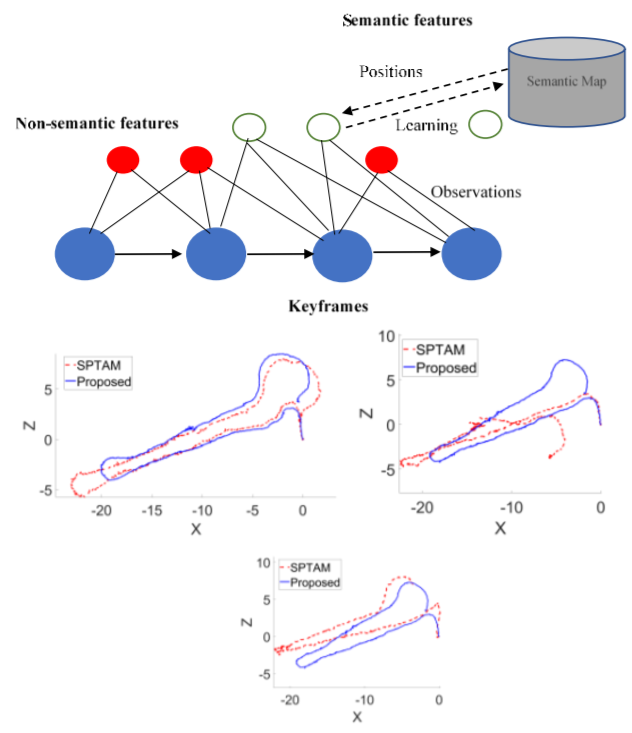
Ambuj Agrawal, Dhruv Agarwal, Mehul Arora, Ritik Mahajan, Shivansh Beohar, Lhilo Kenye, Rahul Kala. ( equal contribution ) Mediterranean Conference on Control and Automation, 2022 Paper Improved localization accuracy of V-SLAM by injecting semantic information of detected corner points from images captured by a robot. Detected object in a scene were used for place recognition and correspondence matching which further enhanced the semantic information provided to V-SLAM module. |
|
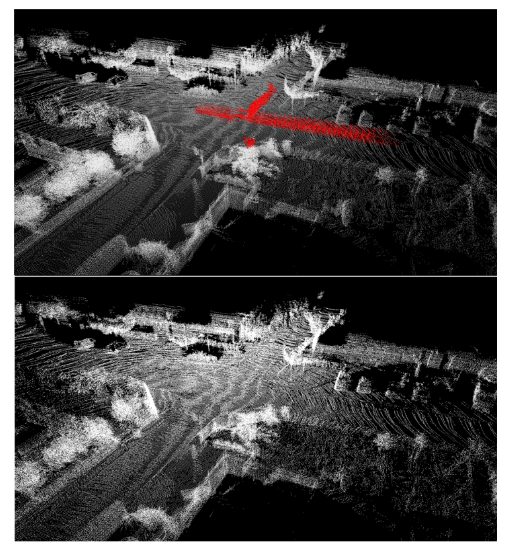
Mehul Arora, Louis Wiesmann, Xieyuanli Chen, Cyrill Stachniss European Conference on Mobile Robots (ECMR), 2021 Paper / Code Static Map generation using occupancy grid mapping and ground segmentation |
|
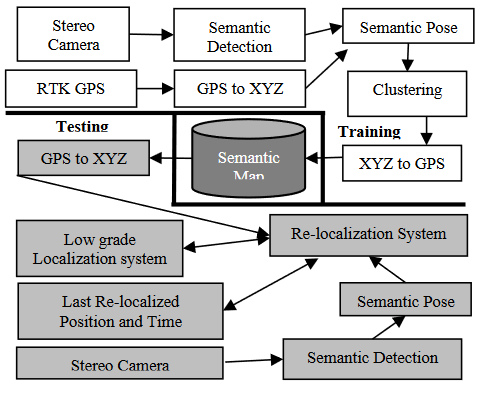
Lhilo Kenye, Rishitha Palugulla, Mehul Arora, Bharath Bhat, Rahul Kala, Abhijeet Nayak IEEE International Conference on Robotic Computing (IRC), 2020 Paper A novel approach of utilizing semantic information present in the environment for robot localization |
|
|

|
A dynamic real-time visual aid for blind people, using Object detection, image captioning and Alexa voice services. |

|
The project consisted of providing an AI powered solution to the users for credit assessment of loans. |
|
Design and source code from Jon Barron's website |